|
| |
 |
 |
Inertiale Mess-Systeme
|
|
|

|
RGA
Orientierungssensor
Der RGA300CA beinhaltet 3 Beschleunigungssensoren und einen MEMS- Drehratensensor für die Z-Achse.
Er ist die ideale Lösung für z.B. Fahrzeuge, bei denen
die Roll- und Pitch-Lage erfasst werden soll. Zusätzlich liefert der
Drehratensensor eine Information über die Drehung des Fahrzeuges um die
eigene Z-Achse (Yaw-Achse). |
|

|
IMU
Inertial-Messeinheit
Die inertiale Messeinheit vereint 3 Drehratensensoren
(Rate Gyros) und 3 Beschleunigungssensoren in einem System.
Die Crossbow IMU300CA und IMU400CD sind Halbleiter IMU´s, die die neueste MEMS- Technologie verwenden, kombiniert mit
einer speziell dafür entwickelten digitalen Signalverarbeitung, um ein
leichtes, kompaktes und zuverlässiges System zu erhalten. Die IMU700CB
verwendet hochstabile faseroptische Kreisel.
|
|
|
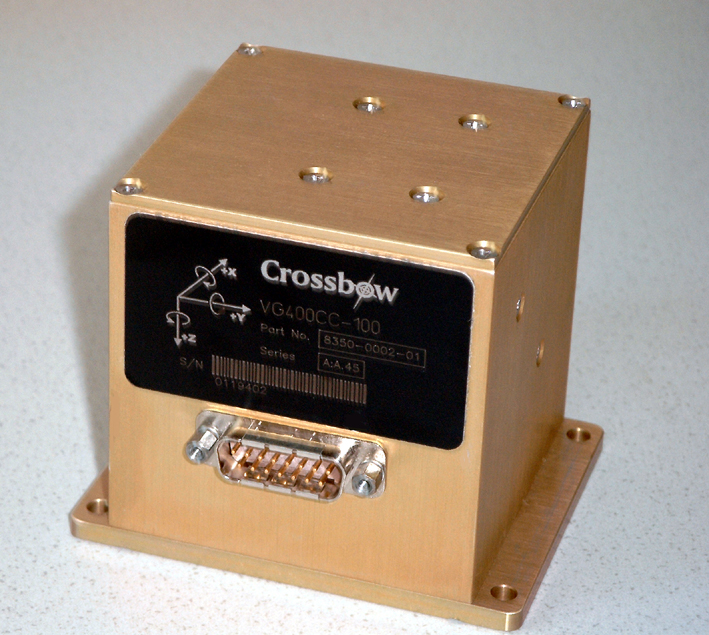
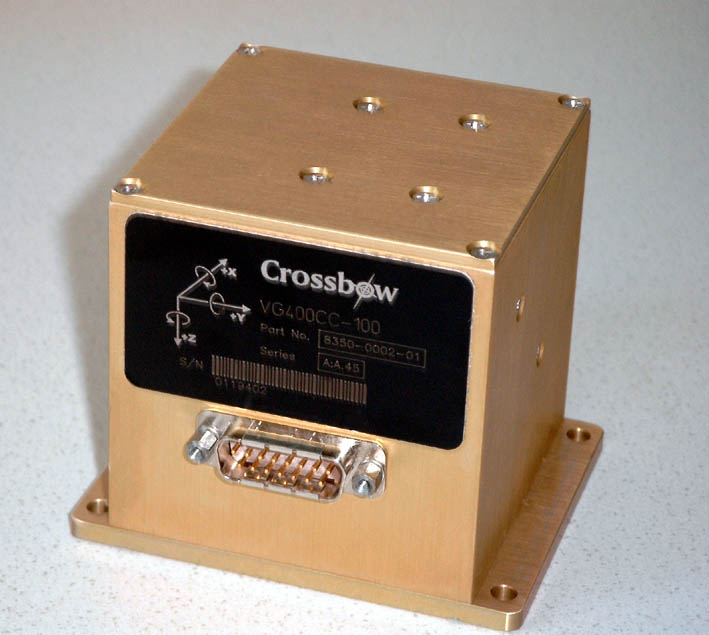
VG
Vertical Gyroskop
Herkömmliche Gyros verwenden mechanische
Kreiselsysteme, die nach einer Anlaufphase Pitch- und Rollwinkel
ausgeben, relativ zur horizontalen Erdachse.
Das Crossbow Modell VG400CD ist ein Halbleiter-
Inertialsystem, das mit neuester MEMS-Technologie Drehraten-
und Beschleunigungssensoren verwendet, um elektronisch stabilisierte
Signale auszugeben, ohne Einschränkungen durch den Messbereich oder
durch die Aufwärmzeit
herkömmlicher Systeme. Die Modelle VG700CB und VG700AB verwenden hochstabile faseroptische
Kreisel. |
|

|
AHRS
Inertialsystem für Lage und Richtung
Das Referenzsystem für Lage und Richtung kombiniert die
Eigenschaften eines Vertical Gyros mit einem directional Gyro, um die Lage
(Roll- und Pitch-Winkel) und die Richtung (Heading-Winkel) zu ermitteln.
Die Crossbow AHRS400CD und AHRS500GA sind Halbleiter-Inertialsysteme,
die mit neuester MEMS-Technologie Drehraten-,
Beschleunigungs- und Magnetfeldsensoren mit einer digitalen
Signalverarbeitung kombinieren. Das Modell AHRS500CA ist durch die FAA
zertifiziert (JAA folgt).
|
|
 |

NAV420 Inertialsystem für Lage und Richtung
mit integriertem GPS
Die neue NAV Serie kombiniert AHRS-Systeme und
Navigationssysteme auf MEMS-Basis. Durch die Integration des GPS in dem
NAV420 kann dieses System zusätzlich zur Lage und Richtung auch die Position
und Geschwindigkeit ausgeben. Die Datenrate ist programmierbar bis 100 Hz. |
|
|
Software
Alle Crossbow Inertialsysteme werden mit einer Software
ausgeliefert (GYRO-VIEW), die es dem Anwender erlaubt, in einfacher Weise
die Systementwicklung zu beginnen und schnell Messdaten anzuzeigen. |
Produkt-Übersicht
| Modell |
Option |
alter
Name |
Messbereich |
Sensor-Bandbreite |
| Gyro [°/sec] |
Beschleunigung [g] |
Gyro [Hz] |
Beschleunigung [Hz] |
| IMU300CC |
|
DMU-6X |
|
|
|
|
| |
-100 |
|
100 |
2 |
DC
- 25 |
DC
- 75 |
| IMU400CD |
|
DMU-H6X |
|
|
|
|
| |
-100 |
|
100 |
4 |
DC -
25 |
DC -
75 |
| |
-200 |
|
200 |
4 |
DC -
25 |
DC -
75 |
| IMU700CB |
|
DMU-FOG-6 |
|
|
|
|
| |
-200 |
|
200 |
4 |
DC
- 200 |
DC
- 75 |
| VG400CD |
|
DMU-HDX |
|
|
|
|
| |
-100 |
|
100 |
4 |
DC
- 25 |
DC
- 10 |
| |
-200 |
|
200 |
4 |
DC
- 25 |
DC
- 10 |
| VG700CB |
|
DMU-FOG-VG |
|
|
|
|
| |
-200 |
|
200 |
4 |
DC -
100 |
DC -
10 |
| VG700AB |
|
DMU-FOG-AUTO |
|
|
|
|
| |
-201 |
|
200 |
4 |
DC
- 100 |
DC
- 10 |
| |
-202 |
|
200 |
4 |
DC
- 100 |
DC
- 10 |
| AHRS400CD |
|
|
|
|
|
|
| |
-100 |
|
100 |
4 |
DC -
25 |
DC -
10 |
| |
-200 |
|
200 |
4 |
DC -
25 |
DC -
10 |
| AHRS500GA |
|
|
|
|
|
|
| |
-200 |
|
200 |
10 |
|
|
NAV420CA |
|
|
|
|
|
| |
|
|
200 |
4 |
DC - 25 |
DC - 25 |
|
Consulting